单目双目深度估计论文解读:Two-in-One Depth
发表于: 2024-12-19 11:19:00 | 已被阅读: 1631 | 分类于: 12
单目双目深度估计论文解读:Two-in-One Depth: 单目双目混合自蒸馏训练
原论文:点我
做了什么
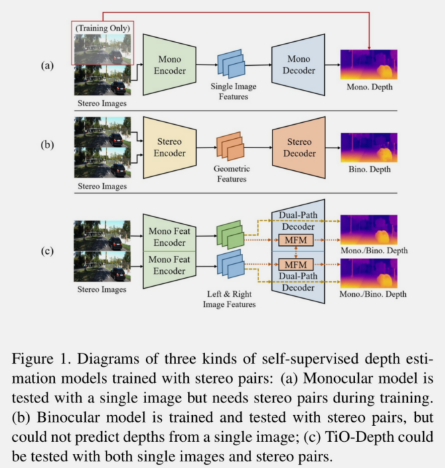
提供了一种高效的单目,双目深度估计混合训练方法,最终得到的网络既可以单目预测,也可以双目预测。
网络核心结构
- 编码器输出多个分辨率的特征
SDFA模块可以执行类似上采样的功能,把相邻两个分辨率的特征层融合,级联3个SDFA模块- 执行双目预测和训练时,使用
MFM模块融合左右视图的特征
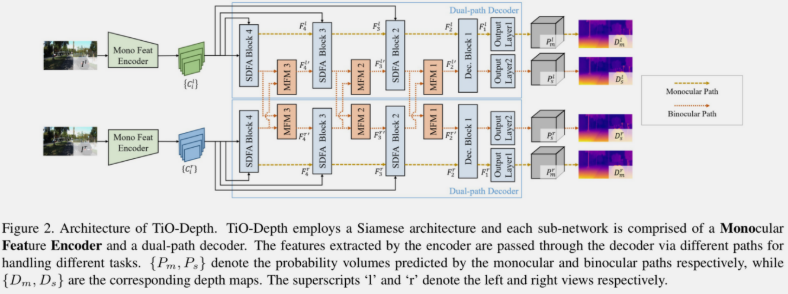
上图中的两个子网络共享参数。
单目路线
以最后一级的 SDFA 模块输出特征作为输入,使用 Dec Block 和 Output Layer 1 输出左视图的 \( P_m^l \)(视差概率张量,论文称为”probability volumes“),然后计算出深度图 \( D_m^l \)。
双目路线
在单目路线的基础上,在 Dec Block 之后多了一个 Output Layer 2,输出预测的右视图的视差概率 \( P_m^r \),最终计算出深度图 \( D_m^r \)。
视差概率
Output Layer 1/2 生成离散的视差张量 \( V \in R^{N \times H \times W} \),\( N \) 是预设的离散等级,这里解释下 \( N \):预设了最大视差和最小视差后,可以得到视差范围,\( N \) 表示将视差范围按照指定方法划分 \( N \) 个值,第\( n \)个值记为 \( b_n \):
根据前人研究,定义了离散深度约束(discrete depth constraint):与深度负相关的视差可以表示为若干离散视差的加权和,所以事先划分好 \( N \) 个区间后,只需再预测出输入图像的各个像素的权重(视差张量 \( V \) 通过 softmax 操作可以得到这个权重),就可以得到各个像素的视差 \( d \) 了。
\( \odot \) 表示逐元素的乘法,深度值 \( D \) 可以根据基线 \( B \) 以及 \( x \) 轴方向的焦距计算:\( D = (B\cdot f_x)/d \)。
论文还定义了连续深度约束(continuous depth constraint):每个像素的深度值是一个连续变量。
不过个人认为离散/连续深度约束这两个定义并没有什么实际价值,在论文中只是两个名称而已。
MFM模块
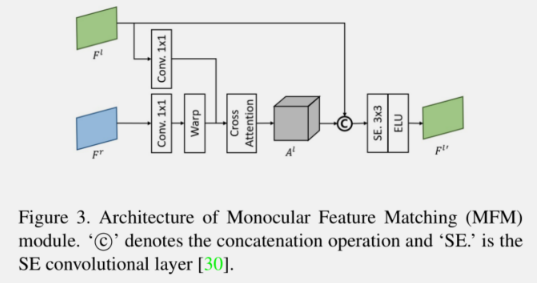
核心结构是使用了交叉注意力机制生成 cost volume(不是很好翻译,它类似于前面提到的”视差概率“) \( A^l \)。具体为:使用 \( 1\times1 \) 卷积分别生成左视图的查询特征 \( Q^l \) 和右视图的键特征 \( K^r \),使用缩放的 \( b'_n = \frac{W'}{W}b_n \) 对 \( K^r \) 做 \( N \) 次偏移可以得到一组键特征 \( K^r_n \) ,使用查询特征和第 \( n \) 次偏移的键特征可计算第 \( n \) 个 score map:
其中 \( C \) 和\( W \)分别是输入特征 \( F^r \) 与\( F^l \) 的通道数和宽度,,\( sum() \) 表示沿着通道维度求和,通过拼接 \( S_n^l \) ,并沿着通道维度做 \( softmax \) 得到最终的 cost volume \( A^l \in R^{N\times H' \times W'} \) :
将左视图的特征 \( F^l \) 和 \( A^l \) 拼接,再经过 \( SE \) 卷积模块即可获得融合后的特征:
这个模块也是可以形象理解的:通过对右视图特征 \( F^r \) 各个像素做多次的预设偏移,总有某些预设偏移是接近真实偏移(视差)的,再从左视图特征 \( F^l \) 构建查询特征,最终生成的 \( A^l \) 可看作是从各个像素的 \( N \) 个预设偏移的查询的视差概率。
训练
训练过程分3个阶段进行:
- 训练阶段1:单目训练
- 训练阶段2:结合单目训练的结果,执行双目训练
- 训练阶段3:结合前面两个阶段的训练结果,构建更加可靠的教师预测,训练出性能更加优秀的单目结果,因为使用自身制作教师预测,所以该过程被称作”自蒸馏“
注意,Figure 2 中画的图其实不完整,在单目深度训练时,实际上作者使用了不同的偏移学习分支预测了两个张量,论文中被称为辅助张量 \( V_a \) (只在训练时使用)和最终张量 \( V_m \),分别可以在不同 steps 使用图像光度损失(photometric loss)和蒸馏损失训练。单目预测最终使用 \( V_m \) 计算深度值。辅助张量 \( V_a \) 主要参与前两个阶段的训练,\( V_m \) 则在训练阶段3使用自蒸馏的方式训练。
训练阶段1
使用右视图的辅助张量 \( V_a^r \in R^{N\times H \times W} \)可以得到右视图各个像素的视差,结合右视图真实图像\( I^r \),可以得到左视图的重构图像 \( \tilde{I_a^l} \)。具体来说,将右视图的辅助张量 \( V_a^r \) 的第 \( n \) 个通道偏移 \( b_n \),可以得到左视图的辅助张量 \( \hat{V_a^l} \),然后对 \( \hat{V_a^l} \) 沿着通道维度做 softmax操作生成对应的视差概率张量 \( \hat{P_a^l} \),左视图的重构图像可以按以下方式得到:
\( I_n^r \) 是偏移 \( b_n \) 的左视图,使用真实的左视图 \( I^r \) 作为左视图重构图像的标签,论文构建了损失函数
训练除了 MFM 模块之外的所有网络参数。
训练阶段2
使用右视图的真实图像 \( I^r \) 和预测的左视图的深度图 \( D_s^l \in R^{1\times H \times W} \),可以计算出左视图的重构图像 \( \tilde{I_s^l} \)。设 \( p \in R^2 \) 是左视图图像中的像素坐标,那么结合 \( D_s^l \) 便可以在右视图中找到对应的坐标 \( p' \):
个人认为这里实际上构建的是一个理想情景:认为左右视图已经严格水平对齐,因此视差仅体现在 \( x \) 轴方向上。在工程化时,需结合相机的外参做极线矫正之类的操作,或者构建一种更加可靠的坐标变换方式。
通过将右视图图像中 \( p' \) 处的像素值赋值到左视图重构图像的 \( p \) 处,即可得到重构的左视图图像\( \tilde{I_s^l} \)。
在本阶段的训练中使用了上一阶段的训练结果,动机是符合直觉的:在双目成像的左右视图中,因为视角因素,多少会存在一些在左/右视图中可以看到,但是在右/左视图中看不到的像素(后面称为遮挡像素),这些像素在双目估计深度时是不该参与一般的损失计算的。而单目预测就不存在这样的问题,所以本训练阶段并没有使用完整的左视图真实图像 \( I^l \)做标签,而是使用了处理过的左视图图像 \( I^{l'} \)作为标签图像:
也即:将\( I^l \)中的遮挡像素使用基于单目预测重构的左视图 \( \tilde{I^l_a} \)中对应位置的像素替代,其中 \( M^l_{occ} \) 是遮挡掩码:遮挡发生时为0,否则为1。
\( M_{occ} \)的计算参考另一篇论文: $$ M(x,y) = \begin{cases} 1 & \min_{i \in (0, W-x)}\left( I_{d}(x+i, y) - I_d(x, y) -i \right) \ge k \ 0 & otherwise \end{cases} $$ \( W \) 是预先定义的搜索宽度,\( k \) 是预设值,\( I_d \) 是视差图。这个定义也是符合直觉的:如果视差图中某个位置的视差变化过快,则认为此处可能是原双目视图中的遮挡像素。
有了重构的左视图图像 \( \tilde{I_s^l} \) 和它的标签图像 \( I^{l'} \),计算损失函数就很简单了,论文如下定义:
\( \alpha \) 是超参数,\( SSIM() \) 用于计算两个图像之间的差异,比较容易实现,本文不赘述。
网络结构中的3个 MFM 模块生成的3个 \( \{A_i^l\}_{i=1}^3 \) 通过单目训练中的辅助张量生成的概率张量 \( P_a^l \) 引导训练:
\( \Omega_i \) 表示 \( A_i \) 中有效的 \( x \) 坐标数量,\( t_1 \) 是预设值,\( \left< \right> \) 表示双线性采样。
论文还从梯度上,以及单目训练中的辅助视差图的边缘区域定义了视差引导损失,以提升双目训练的性能:
其中的 \( M_{out} \) 是表示重投影坐标是否位于图像外部的掩码,是则为1,否则为0。最终,训练阶段2的损失为:
在本阶段,只有双路 decoder 模块的参数被优化,encoder 的参数保持不变。
训练阶段3
这一步骤的关键内容就是结合前面两个阶段的训练结果,构建尽量准确的视差概率作为教师信号,优化单目训练中的 \( V_m \),目的是获得更加准确的单目估计。论文首先计算半物体边缘图(half-object-edge map)\( M^l_{hoe} \)用于指示像素该使用单目估计还是双目估计,\( M_{hoe}^l \) 是一个灰度图,按照以下方式计算:
\( maxpool() \) 是 \( 3\times3 \) 步进 1 的最大池化,\( k \) 是 \( 3\times3 \) 的拉普拉斯算子核,使用拉普拉斯核对深度图 \( D_s^l \) 进行卷积再计算 \( L1 \),得到梯度幅值,最大超计划可以增强区域的梯度响应,\( t_2 \) 可看作是温度系数,\( min() \) 将值控制在 \( [0, 1] \) 范围内。
\( M_{occ'}^l \) 表示反掩码,它可以消除由于遮挡导致的不可靠深度信息,通过将左视图的视差当作右视图的视差计算而来。
\( M_{hoe}^l \) 的意义也是形象的,它核心是突出深度变化剧烈的区域,例如物体的边缘,前文已经分析过,在物体的边缘,双目估计因为视角的原因,通常不准确。所以 \( M_{hoe}^l \) 指示了输入图像各个像素的深度估计是双目估计准确,还是单目估计准确,此时结合前2个训练阶段的结果,可以得到更加准确的混合视差概率:
\( P_h^l \) 可认为是前两个训练阶段共同获得的更加精确的教师信号,它用于指导 \( V^l_m \) 的训练,损失函数可使用 \( KL \) 散度定义,以拉近 \( P^l_m = softmax(V^l_m, dim=通道维度) \) 与 \( P_h^l \):
这一训练阶段仅优化 SDFA ,decoder 模块以及 \( Output Layer \) 的参数。
结果
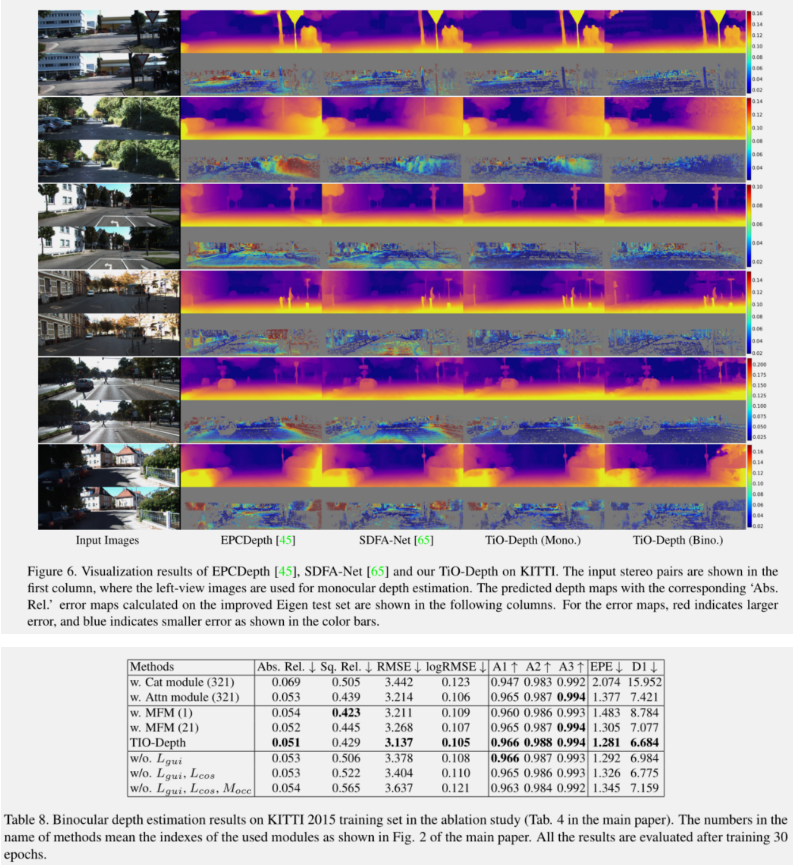
结果还不错,尤其在灌木丛的估计中,层差感被估计出来了。