einsum函数是 Numpy 库非常出色的计算函数之一。einsum函数非常灵活,也非常高效,运行时占用的存储空间很小。不过einsum函数这么多优异的特点不是没有代价的——要想灵活的使用它,就需要花一些时间了解它。
网络上已经有不少内容介绍einsum函数的基本原理和实现,所以本文不对这些内容再做赘述,相反,这里只是做一些相对易懂的基本介绍,重点在于介绍如何使用它。
einsum是干什么的
使用einsum函数可以为 numpy arrays 指定一些数学计算,指定方式主要参考爱因斯坦求和约定,来看个例子:
假设有两个 array,A 和 B,现在我们希望:
- 求 A 乘 B(注意,这里的乘不一定是简单的标量乘法),得到新的 array,然后
- 按照指定的纬度方向求和,并且/或者
- 按照指定的纬度,变换(transpose)新array的纬度方向
虽然常规的 numpy 乘法/加法/transpose 操作能够完成上述期望,但是使用einsum能够使用更小的空间,更快的速度完成。(https://blog.popkx.com 原创,未经许可抄袭可耻)我们将上述例子实例化:
A = np.array([0, 1, 2])
B = np.array([[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]])期望是:先计算 A 和 B 的逐元素乘积,然后沿着 axis 1 求和。
先来看看使用 numpy 的常规操作。首先需要做的是 reshape A,然后在做 broadcast,将其变成和 B 一样的形状。然后将 B 的第一行乘以 0,第二行乘以 1,第三行乘以 2,最终得到一个结果 array,再将其沿着 axis 1 求和:
>>> (A[:, np.newaxis] * B).sum(axis=1)
array([ 0, 22, 76])这行代码能够准确的计算出结果,但是使用einsum更好一点:
>>> np.einsum('i,ij->i', A, B)
array([ 0, 22, 76])为什么更好?简单来说,使用einsum,我们就不需要先对 A 做 reshape 和 broadcast(这个操作通常可以隐式的完成)操作了,更重要的是,在计算执行过程中不需要像 A[:, np.newaxis] * B 那样创建临时array了。相反,einsum简单的沿着行求积的和。
实际上,即使是这个简单的例子,我测试使用
einsum计算的速度要是常规手段的 3 倍。
怎么使用einsum
使用einsum的诀窍就是关注输入/输出 arrays 的轴。einsum支持两种使用方式来标注轴变化:字符串,或者数字列表。不过,据我了解,字符串方式要简单许多,不少开源工程都是使用此种方式。
这里以矩阵乘法作为简单实例,矩阵乘法其实就是一个矩阵的行逐元素乘以另一个矩阵的列,然后把乘积加在一起。(https://blog.popkx.com 原创,未经许可抄袭可耻)对于两个 2D arrays A 和 B,使用 einsum 计算它俩的矩阵成绩可以按照下面这么写:
np.einsum('ij,jk->ik', A, B)第一个参数'ij,jk->ik'是什么意思呢?将'->'看作分隔符,左边的部分'ij'表示输入 A 的轴,'jk'表示 B 的轴,右边的'ik'表示输出结果的轴。所以现在我们能够知道,这行代码接收两个 2D arrays 作为输入,输出也是一个 2D array。下文将参数'ij,jk->ik'称作轴标签
将 A 和 B 实例化:
A = np.array([[1, 1, 1],
[2, 2, 2],
[5, 5, 5]])
B = np.array([[0, 1, 0],
[1, 1, 0],
[1, 1, 1]])我们将轴标签的输入/输出轴画出来:
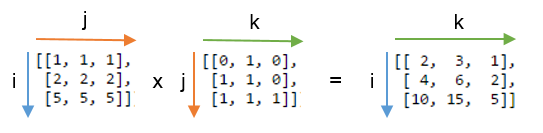
要理解上述计算过程,记住下面这三条规则:
- 输入arrays沿着重复的那个轴做乘法计算。
在本例中,轴标签的输入参数ij,jk中 'j' 被重复用了 2 次:1次表示A的第二个轴,1次表示B的第一个轴。这意味着要计算A的第二个轴(行方向)与B的第一个轴(列方向)的乘积。所以,此时要保证输入合法,就需要保证A的行长与B的列长一致。
- 如果某个轴标签在输出标签中消失了,则表示要沿着该轴做求和计算。
此处,'j' 没有出现在输出标签中,这表示在执行乘法运算后,需要再沿着'j'轴做求和运算,求和运算减少了输出 array 的 1 个纬度。如果我们将输出标签改为'ijk',那么因为少了求和运算,最终得到的输出 array 将会是 3x3x3 形状的。
如果此处我们将输入/输出标签改为'ij,jk->',也即令所有的标签都不出现在输出轴标签里,那么我们将得到一个标量,这个标量是所有元素的和。
- 我们可以获取任意顺序轴的结果。
如果我们在轴标签中不写'->',那么 numpy 会将只出现一次的标签按照字母顺序组合,作为输出轴标签,所以 ij,jk->ik 和 ij,jk 效果上是等价的。指定轴顺序的输出,可以通过指定轴标签的顺序获得。(https://blog.popkx.com 原创,未经许可抄袭可耻)例如,'ij,jk->ki'可以得到'ij,jk->ik'的转置矩阵。
了解上面三条基本规则后,再来看einsum如何计算矩阵乘法的就简单了。下图是左边是计算np.einsum('ij,jk->ijk', A, B)的结果,右图则是按照'j'轴求和后的结果:
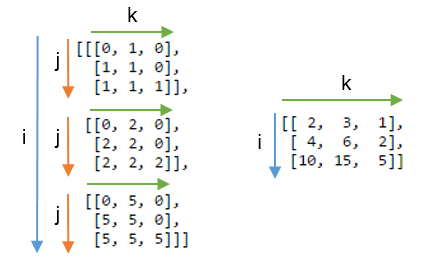
按照前文所述,
einsum是非常节约空间的计算函数,所以对于np.einsum('ij,jk->ik', A, B),einsum并不构建临时的 3D array 然后求和,而是直接在 2D 空间累加得到最终结果。
einsum 的简单操作
下面两张表描述了 einsum 的基本操作。
若 A 和 B 为两个 1D arrays(假设在相应的操作中,A和B的形状总是合适的),那么:
| Call signature | NumPy equivalent | Description |
|---|---|---|
| ('i', A) | A | A |
| ('i->', A) | sum(A) | A的所有元素和 |
| ('i,i->i', A, B) | A * B | A和B逐元素乘积 |
| ('i,i', A, B) | inner(A, B) | A和B的内积 |
| ('i,j->ij', A, B) | outer(A, B) | A和B的外积 |
若 A 和 B 为两个 2D arrays(假设在相应的操作中,A和B的形状总是合适的),那么:
| Call signature | NumPy equivalent | Description |
|---|---|---|
| ('ij', A) | A | A |
| ('ji', A) | A.T | A的转置 |
| ('ii->i', A) | diag(A) | A 的对角 |
| ('ii', A) | trace(A) | A的迹 |
| ('ij->', A) | sum(A) | A的所有元素和 |
| ('ij->j', A) | sum(A, axis=0) | A的沿着axis=0的和 |
| ('ij->i', A) | sum(A, axis=1) | A的沿着axis=1的和 |
| ('ij,ij->ij', A, B) | A * B | A和B逐元素乘积 |
| ('ij,ji->ij', A, B) | A * B.T | A 和 B.T 逐元素乘积 |
| ('ij,jk', A, B) | dot(A, B) | A 和 B 的矩阵乘法 |
| ('ij,kj->ik', A, B) | inner(A, B) | A 和 B 的内积 |
| ('ij,kj->ikj', A, B) | A[:, None] * B | A的每一行与B的乘积 |
| ('ij,kl->ijkl', A, B) | A[:, :, None, None] * B | A的每一个元素与B的乘积 |
einsum轴标签中的'...'符号
在处理比较多的纬度时,为了方便,可以像 numpy array 一样使用 '...' 符号省略一些纬度的显式表示。例如,
np.einsum('...ij,ji->...', a, b)这一行代码计算的是 a 的后两个轴与 2D array b 的乘积。
注意事项
einsum 在求和时,不会提升数据类型。如果我们使用了位宽比较小的数据类型,可能会得到不期望的结果:
>>> a = np.ones(300, dtype=np.int8)
>>> np.sum(a) # correct result
300
>>> np.einsum('i->', a) # produces incorrect result
44另外,einsum在 numpy 的计算库中并不一定总是最快的。类似于 dot和 inner 的函数一般链接到快速计算库 BLAS,可能会快于 einsum。


博主,您好,我看您的文章写的很好,想转载到CSDN上,请问可以吗?
注明出处,附带原文链接就可以~